The magnetosphere is a region in space that has a magnetic field and charged particles of a celestial body. It is an extended invisible magnetic region outside in space around some celestial bodies such as asteroids, planets, stars, and many other big stellar bodies.
Most astronomical objects have a magnetosphere including our earth. But few objects have no or negligible magnetic field to create their proper magnetosphere.
Here in this article, you will know about the “Magnetosphere of Earth“, and much more information about it.
Earth’s Magnetosphere
All the magnets have their magnetic field. The presence of the magnetic field, plasma, and charged ions in the region of space around a large celestial body is the magnetosphere of the body. Our solar system planets, some of the moons, many asteroids, and even our Sun has a massive magnetic field around them.
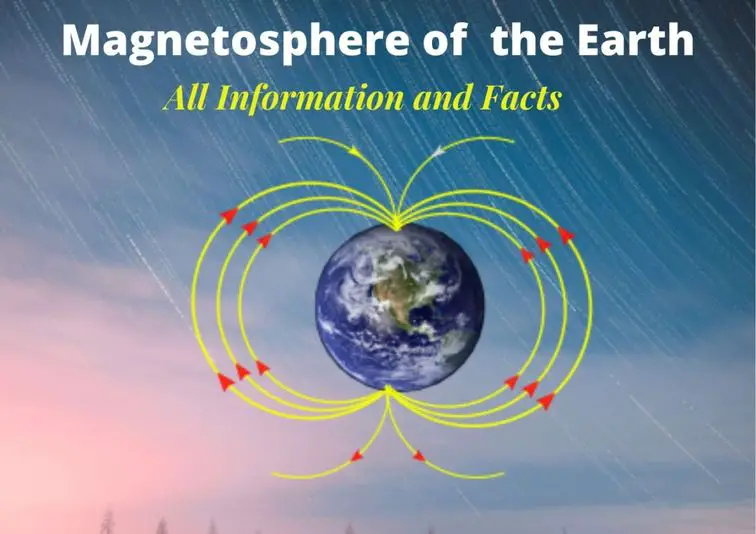
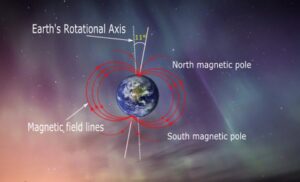
“Our Earth has a magnetic field around it and it is known as the magnetosphere of the earth. The earth’s magnetic field extends from its internal structure to space, where it meets the solar wind and charged particles of the sun.”
The magnetic field of the earth is also known as the geomagnetic field. It comes out from the earth’s internal part and extended into space. Then it approaches the charged particles of the sun’s radiation. That’s how the magnetosphere saves the habitability property of the earth.
The magnetosphere of the earth is the strongest of the four rocky planets. Planet Jupiter has the strongest magnetosphere in all planets and planet Mercury has the weakest magnetic field. Whereas the planets Venus, and Mars do not have a magnetosphere around them.
What is the magnetosphere made of?
The answer to “what is the magnetosphere made of” or “how the magnetosphere of the earth is created” is all about ‘how the magnetic field of the earth is generated’?
As we know the earth has two types of core, 1. The inner core, and 2. Outer core. The earth’s inner core is solid but the outer core is filled with molten iron and nickel. The outer core is almost 2400 km in thickness and located between the mantel and inner core.
In the outer core region, the high temperature around 3000-4500 K and low viscosity fluid of iron and nickel, generates convection current. According to the dynamo theory, these convection currents result in electric currents and thus generate the magnetic field of the earth.
Earth’s magnetosphere is the extended region of its magnetic field to thousands of kilometers into space. This region also contains the charged ions of the solar winds that came from the sun. Where it interacts with each other and saves the earth’s lower atmosphere, from the harmful radiations of the solar winds.
So we can say that magnetosphere is the region that is made dominantly by the magnetic field and plasma of the sun’s radiations.
Structure of the earth’s magnetosphere
The magnetosphere of any astronomical object depends on many factors, like the size of the object’s molten fluid, the object’s axial rotation, the axis of the magnetic dipole, and the amount of charged ions created by the solar winds.
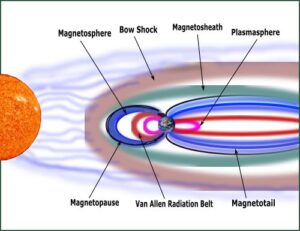
The magnetosphere of any object overlaps to other defined regions in space. Usually, the combination of all regions called the magnetosphere. Here are the several following regions to complete the whole structure:
- Bow Shock
- Magnetosheath
- Magnetopause
- Magnetosphere
- Van Allen Radiation Belt
- Magnetotail
- Plasmasphere)
Bow Shock
Bow Shock is the outermost region of the magnetosphere system. It slows down the solar wind speed of the star.
Magnetosheath
It is the space between bow shock and magnetopause of any astronomical object. Magnetosheath is like a transition region between the solar wind and the magnetosphere. Here the density of charged particles of the solar winds gets lower than ambient space.
Magnetopause
Magnetopause is the boundary in space, where the pressure of the solar winds balances the pressure of the celestial object’s (earth’s) magnetic field. It changes the area and size, according to the pressure difference between the solar winds and the magnetic field.
Van Allen Radiation Belt
The Van Allen Radiation belt exists in the inner region of the magnetosphere. It possesses the energetic charged particles that came from the solar radiations and cosmic rays such as protons, electrons, alpha particles. These particles get trapped with the help of the earth’s magnetic field in this region.
Magnetotail
The solar winds compress the magnetic field of the object at the dayside, whereas the nightside magnetic field extends like a tail. The magnetotail is a zone created by the stretched magnetic field lines in space behind the planet. It has two portions; 1. Northern tail, 2. Southern tail. Both portions are separated by the plasmasphere.
Plasmasphere
The plasmasphere is also known as the inner magnetosphere. This region is located above the ionosphere of the earth’s atmosphere and overlaps with the Van Allen Belt. It contains charged particles or low-energy plasma. The term plasmapause is the outer boundary of the plasmasphere.
Where is the magnetosphere located?
In the region of the earth’s magnetic field, the magnetosphere is located between the magnetopause and Van Allen Belt. Usually, we say all the region affected by the earth’s magnetic field and solar wind is the part of the magnetosphere. But in this all-region, it has a specific place between the magnetopause and Van Allen Belt.
Though all the regions including plasmasphere, Van Allen Radiation, and magnetosphere, and magnetopause usually called the magnetosphere. So here we will read about the location of these all regions.
The plasmasphere is located from 60 km and extends up to around 20000- 28000 km (3 or 4 earth radii) to the earth’s surface.
Dayside or upwind side:-
Van Allen Belt overlaps to the plasmasphere and it has two belts, 1. Inner belt, 2. Outer belt. Its inner belt is located between 1-2 earth’s radii, whereas the outer belt is located between 4-7 earth’s radii.
After the region of the Van Allen outer belt, the magnetosphere starts and it extends up to 50000-65000 km from the earth’s surface. This is the location where the main magnetosphere region exists.
The magnetopause is a boundary and is locates after the magnetosphere. It is not so thick and covers only 100 to 200 km up to the magnetosheath.
The magnetosheath occupies the region of 10-12 earth’s radii at the sun-facing side (dayside) of the planet earth.
Bow shock of the earth at the dayside starts after the magnetosheath and extends up to 90000 km in space from the earth’s surface.
Nightside or downwind side:-
These all above location explains for the sun-facing side that is called dayside. The location of the magnetosphere and all regions at the nightside extends more compare to the dayside. It’s all because the solar wind applies pressure on the magnetic field of the earth and on all the mentioned regions during the nightside. At the nightside, it extends and creates a magnetotail. The magnetotail extends up to 6,300,000 km from the earth’s surface.
Well, the exact location of all the regions varies and depends on many factors. It mainly depends on the solar winds, cosmic rays, and the astronomical object.
How big is the magnetosphere of the earth?
It depends on which side we are looking at either the dayside or nightside of the planet earth. At dayside, it extends up to 65000 km, whereas at nightside it approaches with the magnetotail. If the solar wind is strong or big the magnetosphere gets compress, but if the solar wind is weak it expands.
The answer to this question about “how big is the magnetosphere of the earth” is also related to the magnetosphere location. So read the answer “where is the magnetosphere located?” mentioned above.
How does the earth’s magnetosphere works?
The magnetosphere of the earth is generated by the dynamo theory inside the outer core of the earth. Where it generates the magnetic field with the help of the convective motion of the molten iron-nickel. (read about: what is the magnetosphere made of?)
Our sun has a strong magnetic field and expands all over space and almost covering the whole solar system. The solar winds of the sun came from the corona (the outer atmosphere of the sun is called the corona). It carries the charged particles of electrons, protons, and alpha particles. Solar winds approached earth with a kinetic energy of around 1 to 10 keV. These energy-containing particles called plasma.
The solar wind plasma comes in contact with the different layers of the earth’s magnetosphere. The bow shock lowers the speed of the solar wind plasma and cosmic rays. Whereas the magnetosheath interacts with the plasma and deflects the charged particles. That’s how in the region of the magnetosheath the density of the charged particles becomes lower.
The magnetopause creates a boundary above the main magnetosphere region. With the help of the bow-shock magnetopause deflects the solar wind on the night side of the planet. It also lowers the pressure of the energetic plasma.
Some of the high-energy plasma succeeds to pass the region of the magnetosphere and Van Allen belt. In these region charged particles interacts with the magnetic field and starts bouncing and drifting. Here positive ions start moving westward, whereas negative ions start moving eastward and thus generate a ring current.
Some of the low-energy plasma gets trapped in the plasmasphere. Here the solar wind particles get blocks and our magnetosphere system saves the life and habitability property of the earth. In the plasmasphere some particles come below the ionosphere and collide with the atoms, this phenomenon generates the aurora and emits X-rays.
Why is the magnetosphere important?
We all now know ‘how the magnetosphere works’ and ‘save the earth’ from its habitability property. But the question is what would have happened if there was no magnetosphere. Here are some important advantages of the presence of the magnetosphere.
- Scientists have said without the magnetosphere life is not possible on the planet.
- The magnetic field of the earth saves the planet’s life from the harmful radiation of the sun.
- It also stops the cosmic radiation coming from the outside of the solar system.
- Without the magnetosphere, the atmosphere of the earth and oceans would have extinct out.
How does the magnetosphere protect the earth?
As the magnetosphere of the earth creates a boundary all around. The boundary is generated by the process of geodynamo and develops the magnetic field of the earth. This magnetic field interacts with the solar winds and harmful cosmic radiations to save life on the earth. To know more about how the magnetosphere protects the earth, read the above term “how the earth’s magnetosphere works?”
Earth’s magnetosphere and atmosphere both are different terms and extend up to different locations. Check here how to magnetosphere is different than the atmosphere of the earth. To know about it, go here for “5 layers of the atmosphere“.